Raspberry Pi 日記 (part2)
長嶋 洋一
2013年6月19日(水)
水曜日、講義のない日である。 3限に及川さんのアポ(たぶん映像作品の音楽の相談)、その後に外出の予定があり、放課後にはアカペラなので、午前中が稼ぎ時である。 昨日、モバイルWiFiルータを使ってapt-getして、その1-dayの利用時間がまだあるので、ちょっと先走って、 Blink(1) の関係にトライしてみる事にした。 たぶんうまく行かないので、ここでまた、質問メイルをふーみんに送る、という計画である(^_^;)。
まず、Blink(1)の公式サイトは ここ である。 この右下あたりに「BLINK(1) TOOL : OSX - WINDOWS - LINUX_x86 - LINUX_x64 - RASPBERRY PI - GURUPLUG」というリンクがあり、Raspberry Pi版のBlink(1)ツールがあるのでダウンロードすると これ であり、解凍してRaspberry Piに送っても、実行させると以下のように「no blink(1) devices found」と表示されて、デバイスが認識されない。 おそらくこれは、defaultではRaspberry PiにUSB HIDの関係が全てはインストールされていないのだろう。
そして、たぶん これ をゲットした頃にどこかでゲットしてきたらしい(^_^;)、「blink1hid-demo.py」と「blink1-ctypes.py」の2本がずっとMacのデスクトップに置かれていたのだが、「blink1hid-demo.py」の内容は以下である。pi@raspberrypi ~/Desktop $ ./blink1-tool Usage: blink1-tool <cmd> [options] where <cmd> is one of: --hidread Read a blink(1) USB HID GetFeature report --hidwrite <listofbytes> Write a blink(1) USB HID SetFeature report --eeread <addr> Read an EEPROM byte from blink(1) --eewrite <addr>,<val> Write an EEPROM byte to blink(1) --blink <numtimes> Blink on/off --random <numtimes> Flash a number of random colors --rgb <red>,<green>,<blue> Fade to RGB value --savergb <r>,<g>,<b>,<pos> Write pattern RGB value at pos --readrgb <pos> Read pattern RGB value at pos --servertickle <on/off> Turn on/off servertickle (uses -t msec) --on Turn blink(1) full-on white --off Turn blink(1) off --list List connected blink(1) devices --version Display blink(1) firmware version and [options] are: -g -nogamma Disable autogamma correction -d dNums --id all|deviceIds Use these blink(1) ids (from --list) //--serial <num> Connect to blink(1) by its serial number -m ms, --miilis=millis Set millisecs for color fading (default 300) -t ms, --delay=millis Set millisecs between events (default 500) --vid=vid --pid=pid Specifcy alternate USB VID & PID -v, --verbose verbose debugging msgs Examples blink1-tool -m 100 --rgb 255,0,255 # fade to #FF00FF in 0.1 seconds blink1-tool -t 2000 --random 100 # every 2 seconds new random color pi@raspberrypi ~/Desktop $ ./blink1-tool -m 100 --rgb 255,0,255 no blink(1) devices found pi@raspberrypi ~/Desktop $この冒頭に書かれている pyusb というのも気になる、 おそらく「PythonでUSB」というライブラリだろう。 そして「blink1-ctypes.py」の内容は以下である。#!/usr/bin/python """ blink1hid-demo.py -- Low-level HID access with Python Thanks to Aaron Blondeau for this As he says: "I am working on controlling a Blink1 from an Android. In order to understand how the set feature calls work without wearing out the usb port on my Android I have created a python script that uses the pyusb library. The code is as follows if you wish to share and save some time for other folks." """ import usb # https://github.com/walac/pyusb # + "brew install libusb" on osx # + libusb-win32 (inf method) on windows #Find the Blink1 dev = usb.core.find(idVendor=0x27b8, idProduct=0x01ed) assert dev is not None #The Blink1 takes 8 bytes of input # 1=report_id (0) # 2=action (c = fade to rgb, n = set rgb now) # 3=red # 4=green # 5=blue # 6=th : time/cs high (T >>8) where time 'T' is a number of 10msec ticks # 7=tl : time/cs low (T & 0xff) # 8=step (0) # once a buffer is set with these bytes, we need to do what blink1_write / hid_send_feature_report does # https://github.com/todbot/blink1/blob/master/commandline/blink1-lib.c # https://github.com/signal11/hidapi/blob/master/libusb/hid.c #set color to red bmRequestTypeOut = usb.util.build_request_type(usb.util.CTRL_OUT, usb.util.CTRL_TYPE_CLASS, usb.util.CTRL_RECIPIENT_INTERFACE) action = 0x6E # ='n' (set rgb now) red = 0xFF green = 0x00 blue = 0x00 dev.ctrl_transfer(bmRequestTypeOut, 0x09, (3 << 8) | 0x01, 0, [0x00, action, red, green, blue, 0x00, 0x00, 0x00, 0x00]) #then fade to blue action = 0x63 # ='c' (fade to rgb) red = 0x00 green = 0x00 blue = 0xFF T = 5000/10 #5 seconds worth of 10msec tics th = (T & 0xff00) >> 8 tl = T & 0x00ff dev.ctrl_transfer(bmRequestTypeOut, 0x09, (3 << 8) | 0x01, 0, [0x00, action, red, green, blue, th, tl, 0x00, 0x00]) #get version number import time import string action = 0x76 # ='v' (version) dev.ctrl_transfer(bmRequestTypeOut, 0x09, (3 << 8) | 0x01, 0, [0x00, action, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00]) time.sleep(.05) bmRequestTypeIn = usb.util.build_request_type(usb.util.CTRL_IN, usb.util.CTRL_TYPE_CLASS, usb.util.CTRL_RECIPIENT_INTERFACE) version_raw = dev.ctrl_transfer(bmRequestTypeIn, 0x01, (3 << 8) | 0x01, 0, 8) version = ''.join(chr(i) for i in version_raw) # items in the array should correspond to ascii codes for something like "v 100" version = filter(lambda x: x in string.printable, version) print version #the c code must tack on an extra 0?この2本のPythonブログラムをRaspberry Piに送って実行すると、以下のようなエラーが出た。 これはまぁ、詳細不明である。(^_^;)#/usr/bin/python """ blink1.py -- Python interface to libblink1 through the magic of ctypes import blink1 dev = blink1.open() blink1.setRGB(d, 255,0,0) # Red ... Do not: from blink1 import * or you will polute your namespace with some very common names (i.e. File I/O) Make sure the "blink1-lib" shared library / DLL is in your path for more info see: https://getsatisfaction.com/thingm/topics/more_comprehensive_python_support Thanks to Stephen Youndt for this """ from ctypes import * from ctypes.util import find_library import inspect, os import glob # Find the library localpath = os.path.dirname(os.path.abspath(inspect.getfile(inspect.currentframe()))) libname = find_library("blink1") if libname is None: libname = find_library("Blink1") if libname is None: libname = find_library("blink1-lib") if libname is None: libname = glob.glob(os.path.join(localpath, '[Bb]link1-lib.so'))[-1] if libname is None: libname = glob.glob(os.path.join(localpath, 'blink1-lib.dll'))[-1] if libname is None: libname = glob.glob(os.path.join(localpath, 'lib[Bb]link1*'))[-1] # If we found the library, load it assert libname is not None libblink1 = CDLL(libname) vid = libblink1.blink1_vid vid.restype = c_int pid = libblink1.blink1_pid pid.restype = c_int sortPaths = libblink1.blink1_sortPaths sortSerials = libblink1.blink1_sortSerials enumerate = libblink1.blink1_enumerate enumerate.restype = c_int enumerateByVidPid = libblink1.blink1_enumerateByVidPid enumerateByVidPid.restype = c_int enumerateByVidPid.argtypes = [c_int, c_int] getCachedPath = libblink1.blink1_getCachedPath getCachedPath.restype = c_char_p getCachedPath.argtypes = [c_int] getCachedSerial = libblink1.blink1_getCachedSerial getCachedSerial.restype = c_wchar_p getCachedSerial.argtypes = [c_int] getCachedCount = libblink1.blink1_getCachedCount getCachedCount.restype = c_int open = libblink1.blink1_open open.restype = c_void_p openByPath = libblink1.blink1_openByPath openByPath.restype = c_void_p openByPath.argtypes = [c_char_p] openBySerial = libblink1.blink1_openBySerial openBySerial.restype = c_void_p openBySerial.argtypes = [c_wchar_p] openById = libblink1.blink1_openById openById.restype = c_void_p openById.argtypes = [c_int] close = libblink1.blink1_close close.argtypes = [c_void_p] write = libblink1.blink1_write write.restype = c_int write.argtypes = [c_void_p, c_void_p, c_int] read = libblink1.blink1_read read.restype = c_int read.argtypes = [c_void_p, c_void_p, c_int] getSerialNumber = libblink1.blink1_getSerialNumber getSerialNumber.restype = c_int getSerialNumber.argtypes = [c_void_p, c_char_p] getVersion = libblink1.blink1_getVersion getVersion.restype = c_int getVersion.argtypes = [c_void_p] fadeToRGB = libblink1.blink1_fadeToRGB fadeToRGB.restype = c_int fadeToRGB.argtypes = [c_void_p, c_ushort, c_ubyte, c_ubyte, c_ubyte] setRGB = libblink1.blink1_setRGB setRGB.restype = c_int setRGB.argtypes = [c_void_p, c_ubyte, c_ubyte, c_ubyte] eeread = libblink1.blink1_eeread eeread.restype = c_int eeread.argtypes = [c_void_p, c_ushort, c_void_p] eewrite = libblink1.blink1_eewrite eewrite.restype = c_int eewrite.argtypes = [c_void_p, c_ushort, c_void_p] serialnumread = libblink1.blink1_serialnumread serialnumread.restype = c_int serialnumread.argtypes = [c_void_p, c_void_p] serialnumwrite = libblink1.blink1_serialnumwrite serialnumwrite.restype = c_int serialnumwrite.argtypes = [c_void_p, c_void_p] serverdown = libblink1.blink1_serverdown serverdown.restype = c_int serverdown.argtypes = [c_void_p, c_ubyte, c_ushort] play = libblink1.blink1_play play.restype = c_int play.argtypes = [c_void_p, c_ubyte, c_ubyte] writePatternLine = libblink1.blink1_writePatternLine writePatternLine.restype = c_int writePatternLine.argtypes = [c_void_p, c_ushort, c_ubyte, c_ubyte, c_ubyte, c_ubyte] readPatternLine = libblink1.blink1_readPatternLine readPatternLine.restype = c_int readPatternLine.argtypes = [c_void_p, c_void_p, c_void_p, c_void_p, c_void_p, c_void_p] error_msg = libblink1.blink1_error_msg error_msg.restype = c_char_p error_msg.argtypes = [c_int] enableDegamma = libblink1.blink1_enableDegamma disableDegamma = libblink1.blink1_disableDegamma degamma = libblink1.blink1_degamma degamma.restype = c_int degamma.argtypes = [c_int] sleep = libblink1.blink1_sleep sleep.argtypes = [c_ushort]
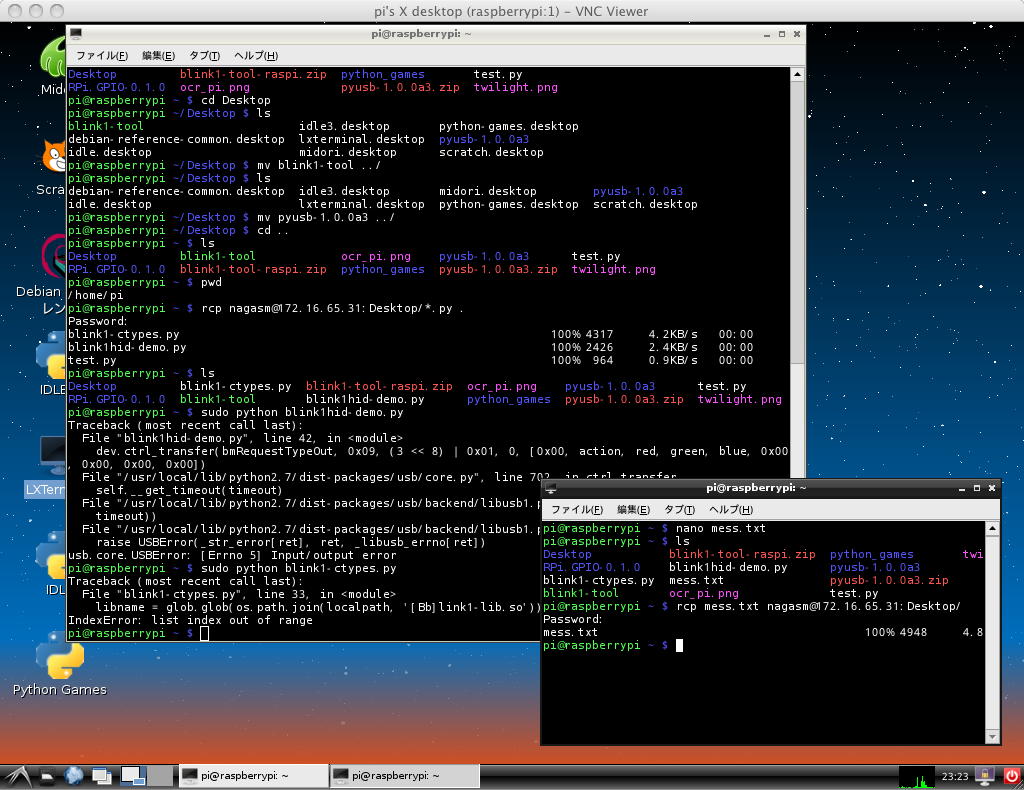
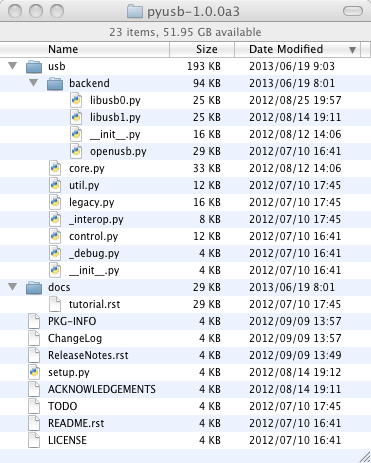
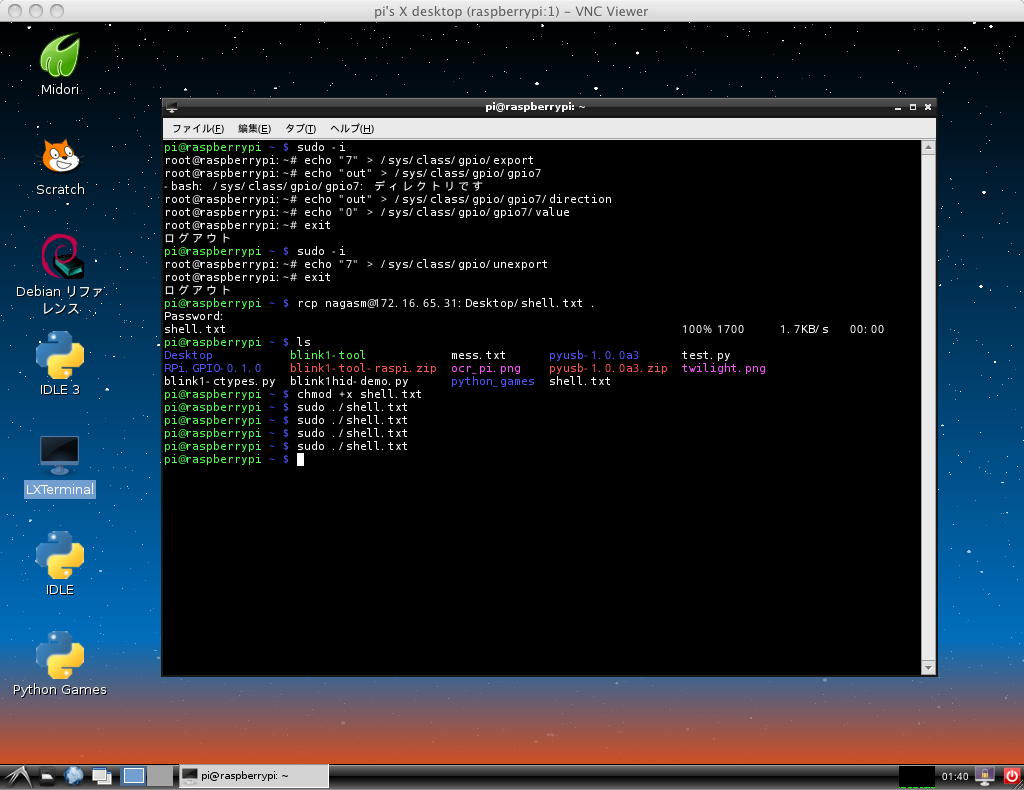
また、関連して検索すると このような ところも出て来た。 これも関係するかもしれない。 そして、 このページ には、「Installing PyUSB on GNU/Linux Systems」という、以下の説明があった。pi@raspberrypi ~ $ ls Desktop blink1-ctypes.py blink1-tool-raspi.zip ocr_pi.png pyusb-1.0.0a3 test.py RPi.GPIO-0.1.0 blink1-tool blink1hid-demo.py python_games pyusb-1.0.0a3.zip twilight.png pi@raspberrypi ~ $ sudo python blink1hid-demo.py Traceback (most recent call last): File "blink1hid-demo.py", line 42, indev.ctrl_transfer(bmRequestTypeOut, 0x09, (3 << 8) | 0x01, 0, [0x00, action, red, green, blue, 0x00, 0x00, 0x00, 0x00]) File "/usr/local/lib/python2.7/dist-packages/usb/core.py", line 702, in ctrl_transfer self.__get_timeout(timeout) File "/usr/local/lib/python2.7/dist-packages/usb/backend/libusb1.py", line 596, in ctrl_transfer timeout)) File "/usr/local/lib/python2.7/dist-packages/usb/backend/libusb1.py", line 403, in _check raise USBError(_str_error[ret], ret, _libusb_errno[ret]) usb.core.USBError: [Errno 5] Input/output error pi@raspberrypi ~ $ sudo python blink1-ctypes.py Traceback (most recent call last): File "blink1-ctypes.py", line 33, in libname = glob.glob(os.path.join(localpath, '[Bb]link1-lib.so'))[-1] IndexError: list index out of range pi@raspberrypi ~ $ これは見慣れたやつである(^_^)。 そこで、またまたRaspberry Pi63号機を固定IPからDHCPにして、「sudo apt-get install python libusb」をしてみたが、「libusb」というライブラリは無いぞ、と叱られた(^_^;)。 ただし、 このページ に行って、「PyUSB is available for download in the SourceForge project page. 」とあったので このページ に行き、 これ をゲットできた。 この内容は以下のような構成であり、チュートリアルは これ である。 なんか、Pythonプログラムのオンパレードである。$ sudo apt-get install python libusb $ sudo python setup.py install
ここにある「readme」に従って、「setup.python」を実行すると、以下のようにエラーが出なかったが、やはりそれでも「blink1hid-demo.py」を走らせようとするとエラーが出た。(^_^;)
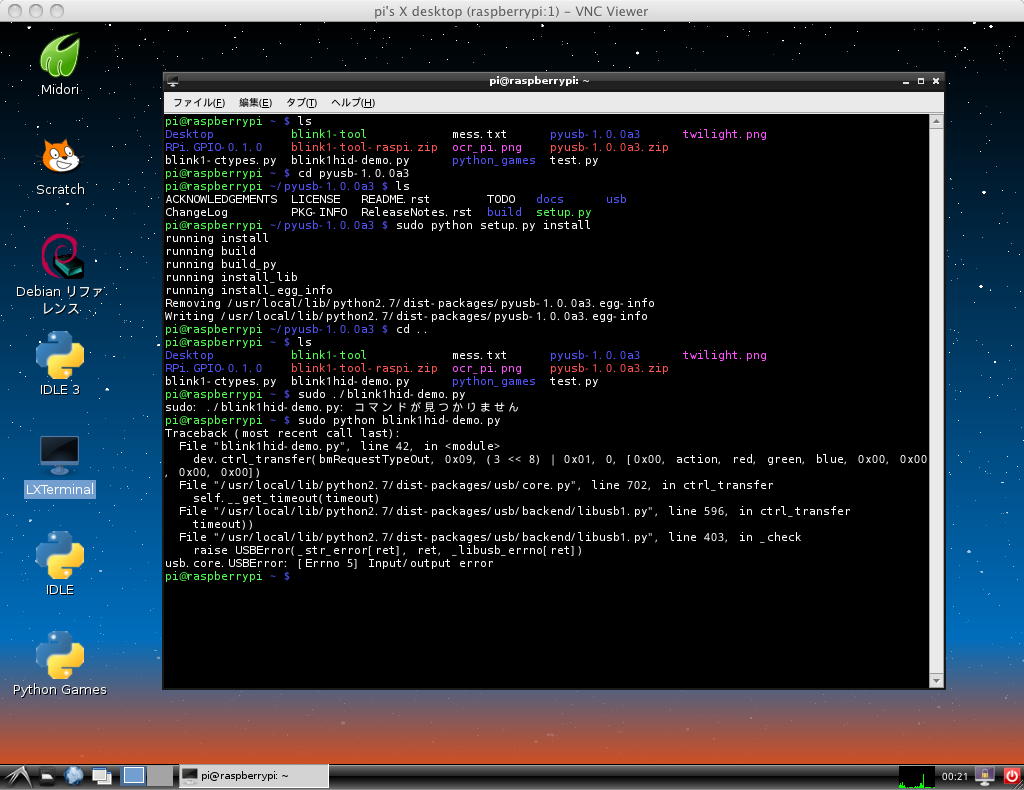
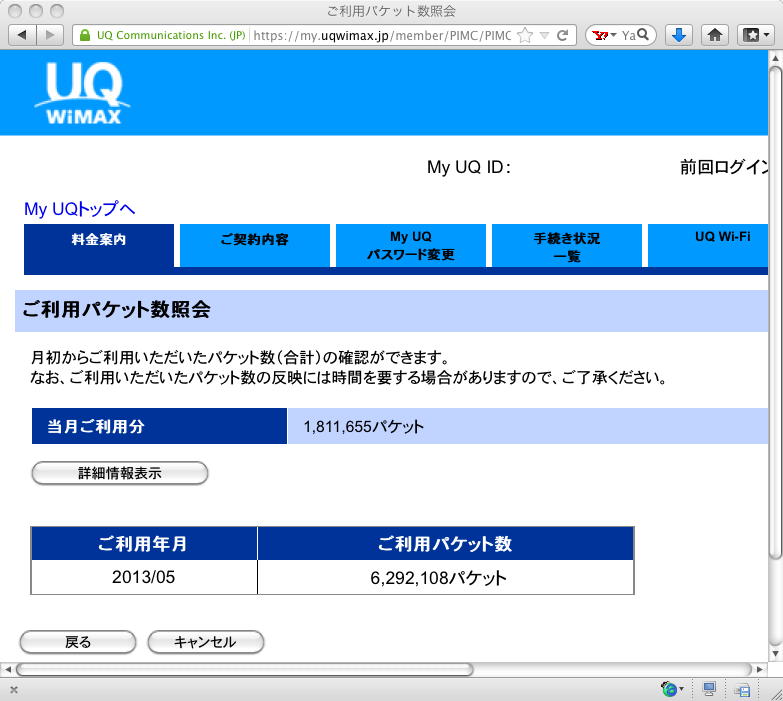
チュートリアル を読む感じでは、やはり、ここはC言語でRaspberry Piを叩くという方向に行く必要がありそうである。 ここでフト、WiFiのサイトに行って、ここまでの利用の記録を見てみた。 やはり、パケット数は相当なもののようで、とうてい「従量制」では使い物にならない模様である。(^_^;)
さて、ふーみん本のGPIOの解説を読み進めていくと、いきなり、昨日のページに書いていた、Raspberry PiのGPIOポートのピンについて、新しい情報が続々と出て来た。 そういえば空きピンについて何も知らなかったが、ちゃんと電源とかGNDとか、あったのである。 そして、ふーみん本の情報から改訂した、Raspberry PiのGPIOポートのピン配置図が以下である。 今後はこちらを使っていこう。(^_^)
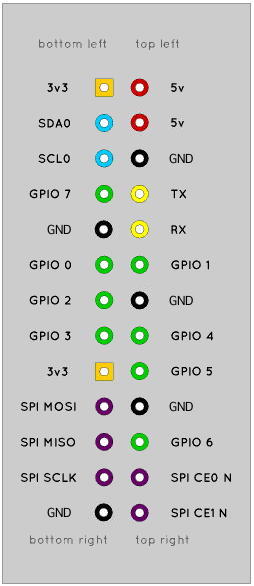
(この図は後で改訂されている事に注意)
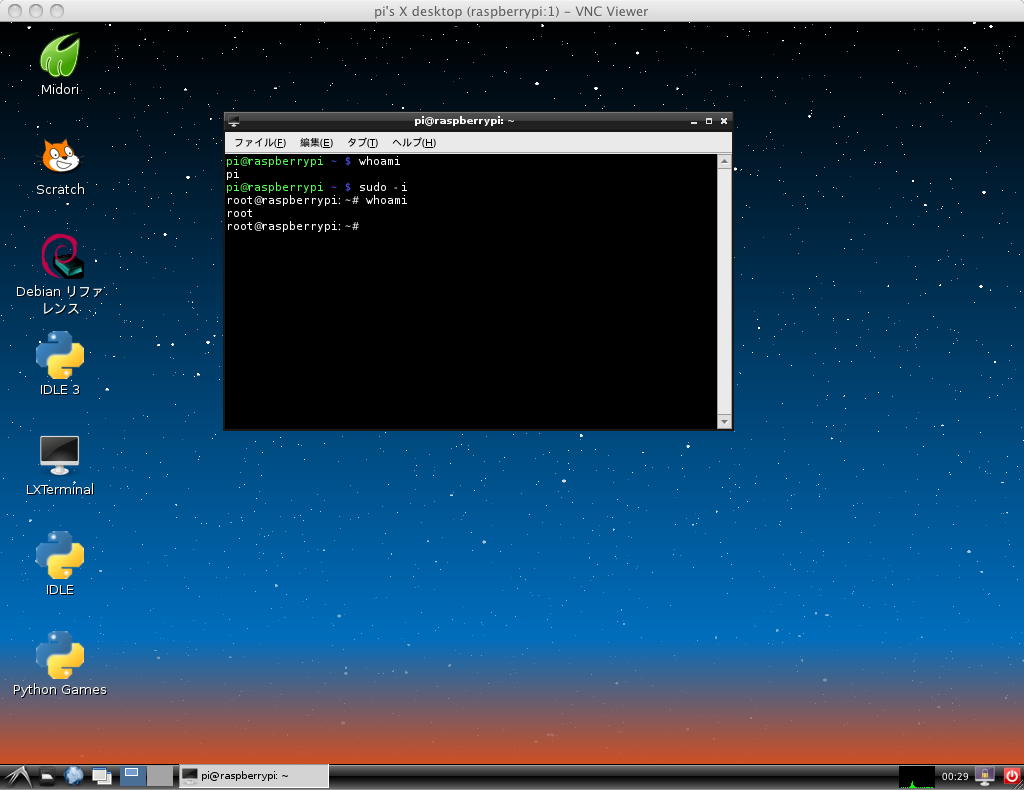
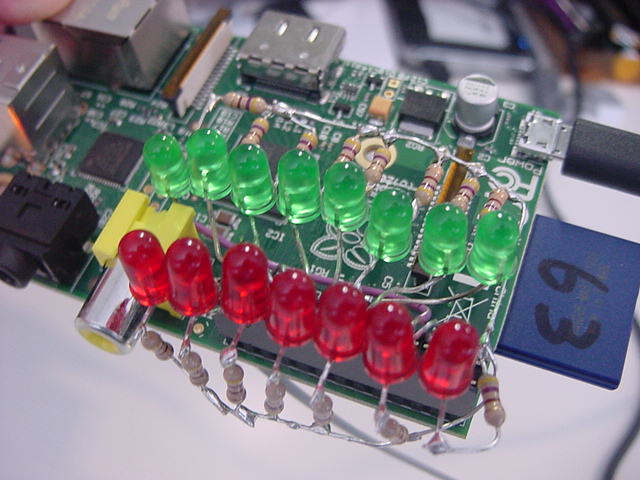
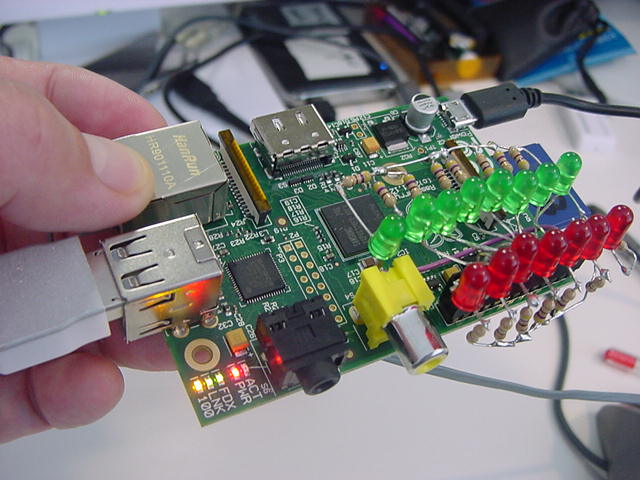
ここから、ハンダごてとかブレッドボードとか電源とかLEDとかの話があって、一気に14ページほどすっとばした(^_^;)。 そしていよいよ、昨日LEDを付けたRaspberry Piに対して、まずはコマンドラインから叩く、という話となった。 GPIOはroot権限でないと叩けないので、ここではまず以下のように、「sudo」でなく、「sudo -i」として、rootになる事から始まる。
そして「echo "17" > ・・・」というところでハテと困った。 上のGPIOポートの17ピンは+3.3Vなのである(^_^;)。 そこでCQ本と照合した結果、なんとRaspberry PiのGPIOポートのピンと、ソフト側から叩く場合のGPIOポートの番号とは別物である、という驚愕の事実が発覚した。 つまりは、関係するところだけ挙げれば、以下のような対応なのだという。
(この表は後で改訂されている事に注意)
ピン番号 信号名 ソフト上の呼び名 11 GPIO 0 GPIO17 12 GPIO 1 GPIO18 13 GPIO 2 GPIO21 15 GPIO 3 GPIO22 16 GPIO 4 GPIO23 18 GPIO 5 GPIO24 22 GPIO 6 GPIO25 7 GPIO 7 GPIO4 8 Tx GPIO14 10 Rx GPIO15 これは、もの凄く、嫌である(^_^;)。 しかし仕方ないのでこれを何度も参照しよう。 すると、ここでCQ本で新たな発見があった。 なんと、サンプルとして、I2CとかSPIのピンを、スイッチ入力とかLED出力に使っているではないか。 そこで以下のように実験して、使わずに捨てるつもりだった計7ビットについても、ちゃんと出力ポートとして拡張できる事を確認した。 これは、「GPIO 0」から「GPIO 7」までの8ビットをデータバスとして使い、ラッチするためのアドレスやライトパルスに使えるので、たった8ビットという制約とは雲泥の違いとなる。 Pythonではアクセス出来ないとすれば使わないだけであり、これは相当に有益な発見なのだ(^_^)。 そこで、I2CとSPIの計7ビットについても追加して、「EXT 0」から「EXT 6」までのオリジナルの信号名を添えて、対応表を以下のように改訂した。
(この表は後で改訂されている事に注意)
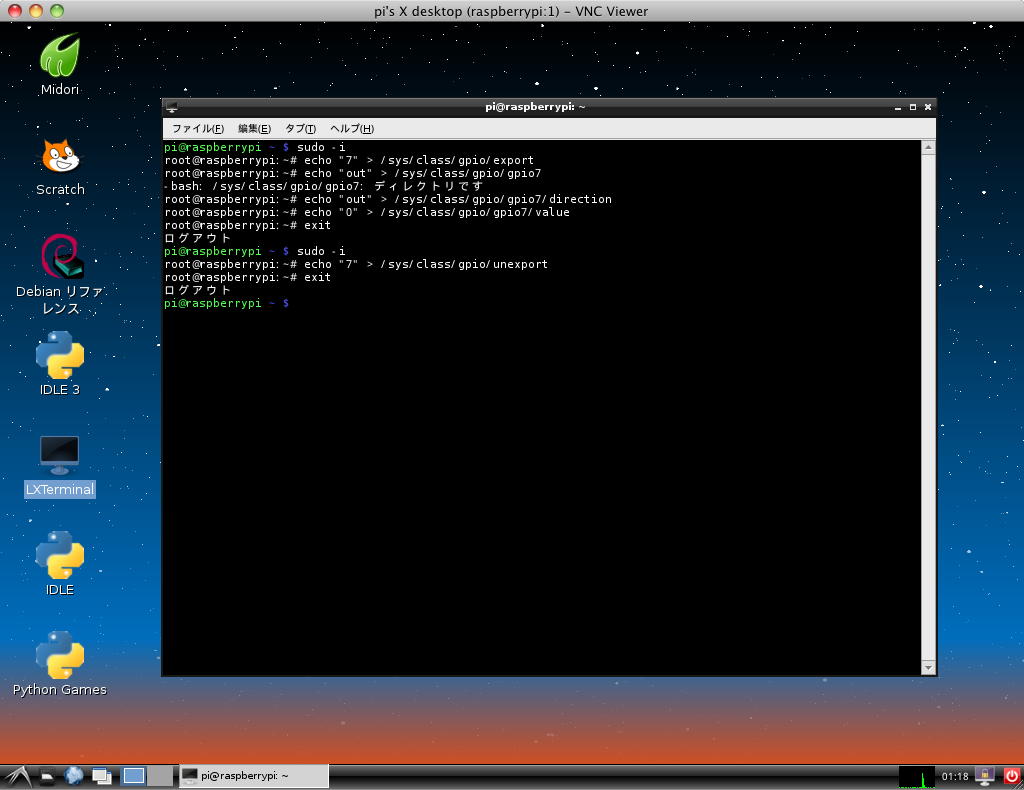
ピン番号 信号名 ソフト上の呼び名 11 GPIO 0 GPIO17 12 GPIO 1 GPIO18 13 GPIO 2 GPIO21 15 GPIO 3 GPIO22 16 GPIO 4 GPIO23 18 GPIO 5 GPIO24 22 GPIO 6 GPIO25 7 GPIO 7 GPIO4 8 Tx GPIO14 10 Rx GPIO15 3 EXT 0 GPIO0 5 EXT 1 GPIO1 19 EXT 2 GPIO10 21 EXT 3 GPIO9 23 EXT 4 GPIO11 24 EXT 5 GPIO8 26 EXT 6 GPIO7 そしてrootになって、以下の手順でのポートの信号出力を確認した。 これは出力についてだが、とりあえずの拡張用途としては出力が多い(たくさんのプロセスが裏で動くUnixで入力のモニタをしたくない(^_^;))との想定である。 ちなみにCQ本の記述の中に、以下のどこかが抜けているバグも発見した。(^_^;)
- 「sudo -i」としてrootになる
- 「echo "7" > /sys/class/gpio/export」としてポートを使用開始
- 「echo "out" > /sys/class/gpio/gpio7/direction」としてポートの入出力方向を出力に設定
- 「echo "1" > /sys/class/gpio/gpio7/value」でポートにHIGH出力
- 「echo "0" > /sys/class/gpio/gpio7/value」でポートにLOW出力
- 「echo "7" > /sys/class/gpio/unexport」としてポート使用を終了
- rootから抜けるのは「exit」
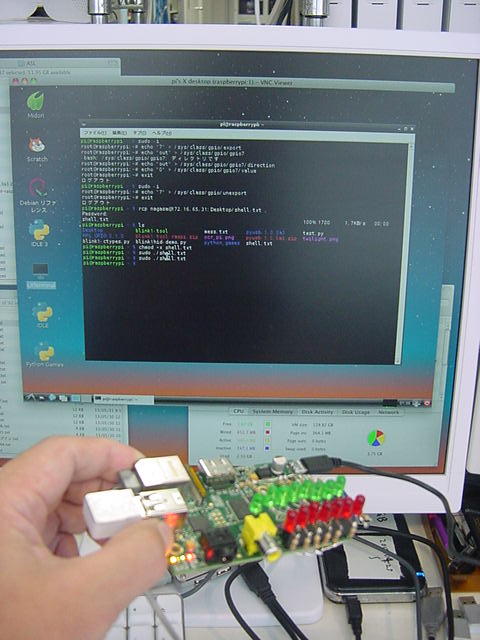
そして、これらをいちいち手で打つのも嫌なので、Mac側のエディタで以下のような内容を作成して、テキストファイル化してrcpでRaspberry Piに送り、それをsudoでシェルスクリプトとして実行できる方法(「chmod -x shell.txt」とやると「shell.txt」がシェルスクリプトとして実行できる)をCQ本の記述から発見して、やってみた。 すると、SPIの5ビットは出力できたものの、I2Cの2ビットは沈黙を保ったままだった。 どうやら3ピンは内部プルアップしている事からも、入力専用のようである。
まぁ、5ビットの拡張出力ビットがあれば、8ビット幅のラッチを16個まで増設できるので、総ビットは128ビットの出力ポート個別制御まで、簡単な外部回路の増設だけで出来るので、まずまず十分だろう。 ただしLinuxという重いシステムのRaspberry Piで、チラつかない十分なスピードで128個を個別にPWM制御できるかどうかは、実験してみないと判らない。echo "0" > /sys/class/gpio/export echo "1" > /sys/class/gpio/export echo "10" > /sys/class/gpio/export echo "9" > /sys/class/gpio/export echo "11" > /sys/class/gpio/export echo "8" > /sys/class/gpio/export echo "7" > /sys/class/gpio/export echo "out" > /sys/class/gpio/gpio0/direction echo "out" > /sys/class/gpio/gpio1/direction echo "out" > /sys/class/gpio/gpio10/direction echo "out" > /sys/class/gpio/gpio9/direction echo "out" > /sys/class/gpio/gpio11/direction echo "out" > /sys/class/gpio/gpio8/direction echo "out" > /sys/class/gpio/gpio7/direction echo "1" > /sys/class/gpio/gpio0/value echo "1" > /sys/class/gpio/gpio1/value echo "1" > /sys/class/gpio/gpio10/value echo "1" > /sys/class/gpio/gpio9/value echo "1" > /sys/class/gpio/gpio11/value echo "1" > /sys/class/gpio/gpio8/value echo "1" > /sys/class/gpio/gpio7/value sleep 1 echo "0" > /sys/class/gpio/gpio0/value sleep 1 echo "1" > /sys/class/gpio/gpio0/value echo "0" > /sys/class/gpio/gpio1/value sleep 1 echo "1" > /sys/class/gpio/gpio1/value echo "0" > /sys/class/gpio/gpio10/value sleep 1 echo "1" > /sys/class/gpio/gpio10/value echo "0" > /sys/class/gpio/gpio9/value sleep 1 echo "1" > /sys/class/gpio/gpio9/value echo "0" > /sys/class/gpio/gpio11/value sleep 1 echo "1" > /sys/class/gpio/gpio11/value echo "0" > /sys/class/gpio/gpio8/value sleep 1 echo "1" > /sys/class/gpio/gpio8/value echo "0" > /sys/class/gpio/gpio7/value sleep 1 echo "1" > /sys/class/gpio/gpio7/value echo "0" > /sys/class/gpio/unexport echo "1" > /sys/class/gpio/unexport echo "10" > /sys/class/gpio/unexport echo "9" > /sys/class/gpio/unexport echo "11" > /sys/class/gpio/unexport echo "8" > /sys/class/gpio/unexport echo "7" > /sys/class/gpio/unexport

YouTube ここで、汎用入出力の8ビットの他の7ビットの名前を以下のように変更して、当面はこの表で行くことにした。 I2Cの2ビットは入力の拡張用として、SPIの5ビットを出力の拡張に利用する作戦である。
(この表は後で改訂されている事に注意)
ピン番号 信号名 ソフト上の呼び名 11 GPIO 0 GPIO17 12 GPIO 1 GPIO18 13 GPIO 2 GPIO21 15 GPIO 3 GPIO22 16 GPIO 4 GPIO23 18 GPIO 5 GPIO24 22 GPIO 6 GPIO25 7 GPIO 7 GPIO4 8 Tx GPIO14 10 Rx GPIO15 3 Ex_In 0 GPIO0 5 Ex_In 1 GPIO1 19 Ex_Out 0 GPIO10 21 Ex_Out 1 GPIO9 23 Ex_Out 2 GPIO11 24 Ex_Out 3 GPIO8 26 Ex_Out 4 GPIO7 そして、午前中にふーみんに出していたメイルに、昼過ぎに以下のように返信があった。 さっそくBlink(1)と、せっかくなのでSlice基板もプレゼントとして発送手配した。 しかしやはり、このビン番号の対応は大混乱の模様である。(^_^;)
ここで昼休みが終わり、アポのあった及川さんと、総合演習IIの映像作品の音楽について相談した。 今月中、という新たな目標が出来たが、来月末の完成が楽しみである(^_^)。 さて、ふーみん本の続きでは、「温度センサのデータをI2Cで取得する」というトピックである。 しかし僕はI2Cは使うつもりが無いので、ここはサクサクとスキップである。 ただし、defaultではライブラリもインストールされておらず、環境としても登録されていないI2Cをどうやって使うか、というのは、他のケースでも(もしかするとBlink(1)でも)関係するので、以下のようにメモとして整理しておいた。ちらっと読みましたが,現物を提供していただけるのであれば 手元でやってみた方が早そうです^^; ちなみにピン番号の対応のごちゃごちゃさは,私の本の中でも かなり強調して書いたつもりです^^; ・今後,RPiのRevisionが変わるとまた変わる可能性があると明言されている ・ボードの番号,ハード仕様の番号,OSレベルの番号,Wiringの番号,が, すべて規則性なくバラバラ という素敵な状態ですが,magic numberを書かず,定数定義して シンボリックに使いなさい,ということなのでしょう. Systematicにやるなら,各言語ごとに BOARD_3V3_1, OS_3V3_1,WIRING_3V3_1,などのようにマイヘッダを 一度定義してしまえば,あとはそれを使う,という感じでもやれるとは 思いますが,あ,リビジョンによっても違うからそれも定義名に入れないと だめか・・・orzここからしばらくは、取得した温度データの16進数の話、Perlでのデータ変換、全体をシェルスクリプトでまとめる、というお話で軽くスルーできて、(校正原稿の)136ページまでジャンプした。 この次の「定期的な実行」というのは、Raspberry PiというよりもUnixの機能だが、チラッと見てみると「cron」を使っていて「分」単位の起動とあり、さらにWebサーバ(apache)を起動して外部からセンサデータを見る・・・という方向の話だったので、ここも今回はバスする事にした。
- モジュールを有効にする。「sudo nano /etc/modules」で「/etc/modules」を開き、「i2c-dev」を追加する
- ブラックリスト(使わないモジュールの登録ファイル)から外す。「sudo nano /etc/modprobe.d/raspi-blacklist.conf」で、「blacklist i2c-bcm2708」などの行の先頭に「#」を付ける
- ブラックリストを解除したモジュールを「sudo modprobe i2c-bcm2708」としてカーネルに読み込ませる(確認は「Ismod」)
- 「sudo apt-get install i2c-tools」でI2C関係のツールをインストールする
- 正しくインストールされていれば「sudo i2cdetect -y 1」とやるとデバイスを表示する
- 温度データの取得は「sudo i2cget -y 0x48 0x00 w」など
その次のトピックは「大気圧センサのデータを SPIで取得する」というもので、データの変換にはPythonを使っているが、なんせSPIのポートをハードウェア拡張に使用する、という方針のため(^_^;)、ここもパスとなった。 その次のトピックは(校正原稿の)162ページからで、「WebカメラをUSBに繋いでストリーミングと動体検知」というものである。 これは面白そうなので、明日以降にチェックしてみることにした。
「Raspberry Pi日記」トップに戻る