Raspberry Pi 日記 (part2)
長嶋 洋一
2013年7月3日(水)
さて水曜日である。 昨日の火曜日は1限と4-5限の合間に、改訂依頼が来たおいちゃん作曲に取りかかって没頭した。 そして今日は、1限に藤本さんのアポを受けてArduinoシステムの相談に乗り、その後2限に再びおいちゃん作曲に没頭して、遂に改訂版の映像作品サウンドトラックが完成した(^_^)。 これであとは映像作品の完成を待つばかりである。夕方にはいったん帰宅してハムスターの餌やりしてから大学に戻ってアカペラなので、それまで午後の3時間ほどが今日のRaspberry Piタイムである。 Sketching2013に持参するために、Raspberry Piで多数LEDのPWM制御の実験用に、まずは秋月電子の青色LEDを発注した。 そしてその後で気付いたのだが、もともと今年のSketching2013での発表のメインは、Raspberry PiではなくてSUAC boardとPropellerであった事を思い出して(^_^;)、以下のようにシリコンバレーに持参するものを並べてみた。 去年のICMCに持参して実験を終えていた「Propeller+XBee」とか、PropellerでコントロールするSUAC boardなど、すっかり忘却していたところを思い出して(動作確認を兼ねて)、ここにPropellerの代わりにRaspberry Piを繋いで、64ビットLEDのPWM実験とか8チャンネルA/Dの取り込み実験とかをしておく必要があったのだ。 思い出ししているだけで半日以上かかる、という確信がある(^_^;)。

そしてまず、さすがのエボルタ電池も半年経てば抜けている(^_^;)、という事実を確認しつつ、 Propeller日記part2・第3話 の「2012年9月17日(月/祝)」のところまで行っていた、 「XBee_013.maxpat」と「XBee_007.spin」 との動作を確認できた。 OLED内のPropellerのプログラムはとりあえずEEPROMに書かれていて、制御側のMaxプログラムにさらに改良の余地がある、という状態だったようなので、以下の改良点(課題)を再掲しておくことにした。 これはもしかすると、Sketching2013に行っている合間に、進展することになるかもしれない。
これに続いて、久しぶりにSUACboardを取り出してきて、 Propeller日記part3・第2話 の「2013年1月11日(金)」のところにあった、64個のLEDの個別制御PWMの 「SUACboard_test009.maxpat」と「board_010.spin」 との動作と、 Propeller日記part3・第3話 の「2013年2月12日(火)」のところにあった、外付けA/Dコンバータのデータ取得の 「SUACboard_test011.maxpat」と「board_011.spin」 との動作を確認した。 ちょうどふーみん本にあった「Raspberry PiでMIDI」のところから、ローランドの新しいMIDIインターフェース「UM-ONE mk2」も買ったので、このドライバもローランドのダウンロードページから落としてインストールした。 以下が、新しい「UM-ONE mk2」の姿である。残った「中心座標」「半径」「カラー」の指定の4種類、8コマンドの部分でストップした。 Propellerの方のプログラムはコマンドごとに変数バッファを持っているので、 そのまま 延長して拡張していけばいいのだが、Maxの方(jit.lcd)のモニタ画面の描画に関しては、 これまで作ったサブパッチでは、全て共通にカラー指定を行っていた事に気付いた。 これはMaxでは基本のイベント主義、つまり「最後に指定された情報が有効」というもの だが、 ここまでに定義したコマンドと、新たに円ごとにカラー指定をした場合、Propeller の方ではちゃんと受けられるのに対して、 Maxの方(jit.lcd)のモニタ画面では、カラー 情報が上書きされるので、そのままではいかない(^_^;)。 Max側で、カラーを記憶しておくメカニズムを、いくつものサブパッチに対して横断的に 新設する必要がある。
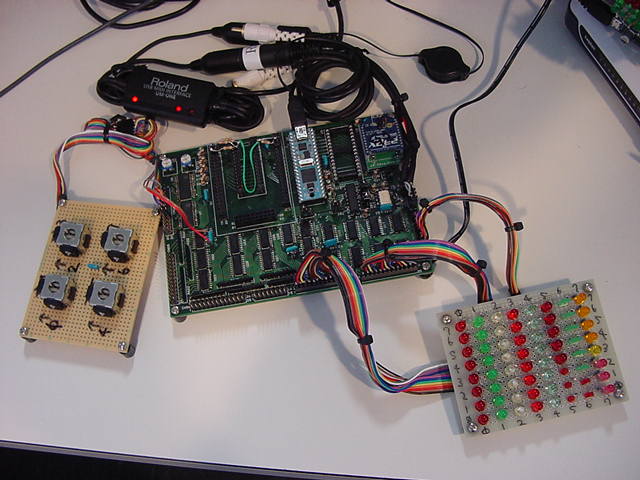

SUACboardにRaspberry Piを繋ぐ時には、Propellerボードを取り去らないといけないので、とりあえず、PropellerのEEPROMには、MIDIを受けてLEDを個別PWM制御する、という「board_010.spin」を書き込んでおいた。 Sketchingに行く際には、Propellerのメインプログラムから呼ばれるライブラリ等も必要なので、「Propeller」ディレクトリごと全部、持参する必要がある。 忘れないように、ここで2台のMacBookAirにも、「UM-ONE mk2」のドライバをインストールしておいた。 これで、Propellerを載せたSUACboardについて、合わせてハードウェアの動作チェックまで出来たことになり、これをRaspberry Piに接続する、という準備までが完了した。 ちょうど16時となり、今日はここまでである。
「Raspberry Pi日記」トップに戻る